


產(chǎn)品分類

山東合運電氣有限公司
手機:15588886921(同微信)
官網(wǎng):www.zcps.com.cn
郵箱:2466458158@qq.com
直流無刷電動機
時間:2022-11-15 人氣: 來源:山東合運電氣有限公司
無刷直流馬達(英語:Brushless DC Motor)或稱直流無刷電機或BLDC電機,是沒有電刷和換向器的電動機,根據(jù)轉(zhuǎn)子永久磁鐵位置調(diào)整定子電流以產(chǎn)生轉(zhuǎn)矩。雖然是稱“直流”馬達,但實際上是一種使用三相電的永磁同步電動機(PMSM)。之所以被稱為“無刷直流電機”是因為在許多應(yīng)用中該電機可以替換有刷直流電機。因此,BLDC電機也被稱為EC(電子換向)電機,以便與包含電刷的機械換向電機進行區(qū)分。
BLDC電機利用電力電子技術(shù)(變頻器)輸入控制訊號到馬達,以切換直流電的開關(guān)和通過的線圈組,而得到力矩使轉(zhuǎn)子轉(zhuǎn)動。但這些控制信號,波形沒有限制。方波驅(qū)動的稱為BLDC,用于位置要求不是很高的場合;正弦波驅(qū)動的稱PMSM,用于伺服場合。
發(fā)展
早在1917年Boiiger就提出了用整流管代替有刷直流電機的機械電刷的想法。1955年,美國D.Harrison等人申請用晶體管換向線路代替有刷直流電機機械電刷的專利,標志著現(xiàn)代無刷電機的誕生。[3]
結(jié)構(gòu)
較簡單的結(jié)構(gòu)是有一枚永久磁鐵及至少兩組(四個端子)線圈,兩組線圈輪流開關(guān)。永久磁鐵是轉(zhuǎn)子,線圈是定子。當(dāng)磁鐵與線圈成一直線的時候,斷開該組線圈,啟動下一組線圈。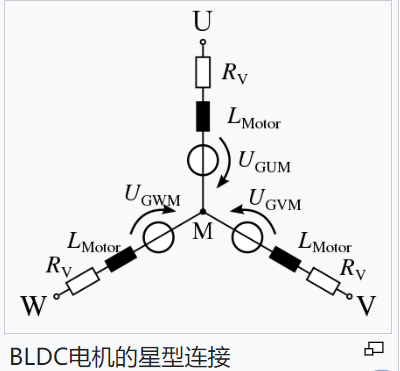
定子
BLDC電機的定子與感應(yīng)電機的定子相似,是由絕緣鑄鋼疊片組成,可以降低渦流的電流損失。多數(shù)BLDC電機都有三個星型連接的定子繞組,繞組置于沿內(nèi)部圓周的軸向沖壓槽中。直徑小于40mm的電機會采用無齒槽設(shè)計:它的定子沒有鐵芯,鐵損大幅減少,因此能效等級更高。
轉(zhuǎn)子
轉(zhuǎn)子用永磁體制成,轉(zhuǎn)子里是沒有線圈的。可有2到8對磁極,南磁極和北磁極交替排列。使用稀土合金磁體可以提高磁通密度,縮小轉(zhuǎn)子體積。永磁體在轉(zhuǎn)子上的安裝方式多種多樣:表貼式永磁(SPM)將永磁體裝在轉(zhuǎn)子鐵芯外圓表面,通常見于高功率密度電機;表面嵌入式永磁(SIPM)電機的永磁體放在轉(zhuǎn)子外表面的凹槽中,使得整個轉(zhuǎn)子為圓柱形,提高了機械強度,防止永磁體在高速旋轉(zhuǎn)時飛出;內(nèi)置式永磁(IPM)轉(zhuǎn)子結(jié)構(gòu)的機械結(jié)構(gòu)可靠,但安裝工藝復(fù)雜,多用于高速電機。
類型
BLDC電機有內(nèi)轉(zhuǎn)子電機和外轉(zhuǎn)子電機兩種結(jié)構(gòu)類型。內(nèi)轉(zhuǎn)子電機的優(yōu)勢在于轉(zhuǎn)子的轉(zhuǎn)動慣量低,散熱非常快,在大多數(shù)工業(yè)應(yīng)用中廣泛使用。外轉(zhuǎn)子電機的定子位于內(nèi)側(cè),轉(zhuǎn)子包括一個能夠旋轉(zhuǎn)外殼,磁體安裝在外殼上,定子發(fā)熱線圈與環(huán)境隔絕,散熱相對較慢。由于轉(zhuǎn)子的轉(zhuǎn)動慣量轉(zhuǎn)矩很大且很難控制轉(zhuǎn)子外殼的平衡,所以外轉(zhuǎn)子電機不適用于旋轉(zhuǎn)速度很高的模式。但外轉(zhuǎn)子電機可以擁有更短的結(jié)構(gòu)并通常具備更小的停轉(zhuǎn)轉(zhuǎn)矩,而由于在相同的磁力下,它的轉(zhuǎn)子直徑更大,因此其轉(zhuǎn)矩也更大。
外轉(zhuǎn)子設(shè)計的永磁直流無刷馬達
|
|
|



以定子繞組中線圈的互連方式分為梯形和正弦電機。采用集中整距繞組時,感應(yīng)電動勢為梯形波,稱為永磁無刷直流電機(BLDC);分布繞組時,永磁轉(zhuǎn)子形成正弦磁場,稱為永磁同步電機(PMSM)。新型向量控制技術(shù)已對無刷直流電機使用正弦波控制,使得轉(zhuǎn)矩波動和低速性能均有較大改善。正弦電機輸出的轉(zhuǎn)矩比梯形電機平滑,但因為繞組之間有額外的互連,從而增加了耗銅量。永磁無刷直流電機(梯形波)的功率密度比永磁同步電機(正弦波)大15%。
控制
在控制BLDC電機時,一般使用的是逆變器電路,例如脈沖寬度調(diào)制(PWM),通過調(diào)整脈沖占空比(ON/OFF)改變電壓:若ON的比率較高,可以得到和提高電壓相同的效果;若ON的比率下降,則可以得到和電壓降低相同的效果。另外,BLDC電機的控制是配合著轉(zhuǎn)子(永磁體)的位置(角度)進行的。因此,電機控制還需要獲取轉(zhuǎn)子位置。
霍爾傳感器
多數(shù)BLDC電機在其非驅(qū)動端上的定子中嵌入了三個霍爾傳感器(Hall sensor)。每當(dāng)轉(zhuǎn)子磁極經(jīng)過霍爾傳感器附近時,它們便會發(fā)出一個高電平或低電平信號,表示北磁極或南磁極正經(jīng)過該傳感器。根據(jù)這三個霍爾傳感器信號的組合,就能決定換向的精確順序。每次換向,都有一個繞組連到控制電源的正極,第二個繞組連到負極,第三個處于失電狀態(tài)。六步換向定義了給繞組加電的順序。通過控制通向線圈的電流方向和大小來控制轉(zhuǎn)子的旋轉(zhuǎn)。
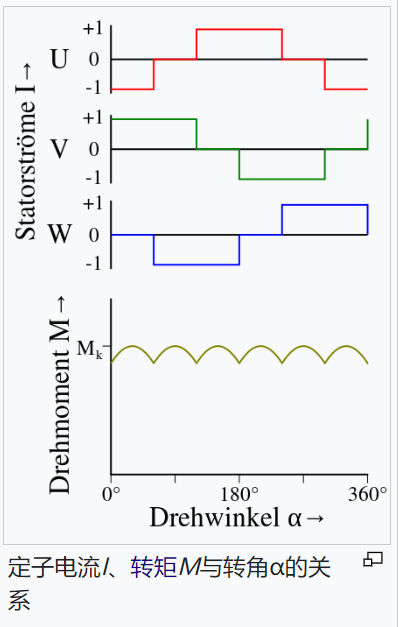
從技術(shù)上來說,霍爾傳感器和塊換向組合是驅(qū)動BLDC電機的最簡單方法。這種技術(shù)的劣勢在于,由于切換過程不連續(xù),在塊換向中,會產(chǎn)生以此為峰值的轉(zhuǎn)矩波動,其頻率為電機電動旋轉(zhuǎn)頻率的六倍。這會引發(fā)振動和噪音;低速下尤其如此,電機不會始終均勻地旋轉(zhuǎn)。通電的理想形式是正弦換向,永磁同步電動機(PMSM)的每個繞組都由一個120°正弦波供電,從而產(chǎn)生強度恒定并持續(xù)旋轉(zhuǎn)的定子磁場。一般來說,對于精密控制合成磁通量的矢量控制,轉(zhuǎn)角傳感器(Angle Sensor)或光電編碼器等高精度傳感器較為有效。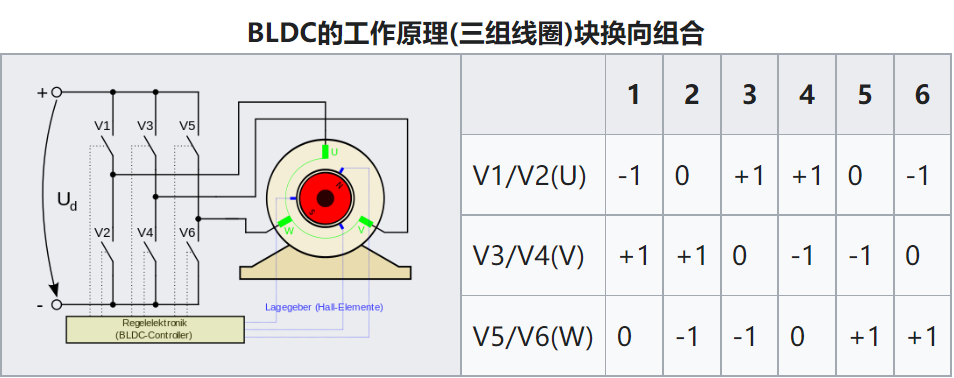
位置檢測專用傳感器的種類及特征
電機類型傳感器種類主要用途特征
BLDC霍爾效應(yīng)傳感器梯形波、120度通電控制每60度獲取一次信號,價格較低,不耐熱。
PMSM光電編碼器正弦波控制、矢量控制分辨率高,但抗震性、防塵能力較弱,成本較高。
轉(zhuǎn)角傳感器正弦波控制、矢量控制分辨率高,適用于惡劣環(huán)境。
無傳感器控制
BLDC電機可以通過監(jiān)視反電動勢信號,而不是霍爾傳感器信號來換向。在既定電機磁通量和繞組數(shù)固定的情況下,反電動勢的幅度與電機的旋轉(zhuǎn)速度成正比。無傳感器控制簡化了電機結(jié)構(gòu)(不需要附加繞組),節(jié)約了成本,但當(dāng)電機處于靜止狀態(tài)時,無法獲得轉(zhuǎn)子位置,因而需要一種特殊的啟動方法。當(dāng)電機在控制模式下運轉(zhuǎn)多個換向周期直到獲得一定速度后,無傳感器測量便能夠確定轉(zhuǎn)子位置。無傳感器控制的BLDC電機適合安裝在難以檢修的位置,或在多灰塵、多油的環(huán)境中運行,但不適合需要較低速度的應(yīng)用,因為此時反電機勢很小而難以測量,會造成工作效率不高。
無傳感器BLDC電機的控制系統(tǒng)由一個MCU控制芯片加上一個IGBT或MOSFET驅(qū)動器組成[,外設(shè)器件有三相PWM、ADC和用于過流保護的比較器。
電動機標量控制和矢量控制的比較
控制參數(shù)V/Hz控制矢量控制無傳感器矢量控制
速度調(diào)節(jié)1%0.001%0.05%
轉(zhuǎn)矩調(diào)節(jié)差±2%±5%
電機模型不要求要求要求精確的模型
MCU處理功率低高高+DSP
特性
BLDC電機的轉(zhuǎn)矩在達到額定值之前都保持不變。電機可達最大轉(zhuǎn)速是額定轉(zhuǎn)速的150%,但從超過額定轉(zhuǎn)速起轉(zhuǎn)矩開始下降。
與傳統(tǒng)有刷式直流電動機相比,無刷式較為安全和可靠。碳刷長期使用有碳粉,高溫環(huán)境下,碳粉可能會爆炸。因此,需要定期清理,同時保養(yǎng)成本較高。但同樣的去除電刷需要使用電子技術(shù),不是透過簡單改變電壓就能控制定子的轉(zhuǎn)動了。
BLDC電機與感應(yīng)電機比較
特性BLDC交流感應(yīng)電機
轉(zhuǎn)速/轉(zhuǎn)矩特性特性曲線平坦,在負載額定的條件,可在所有轉(zhuǎn)速下正常工作。特性曲線非線性,低轉(zhuǎn)速下轉(zhuǎn)矩也低。
輸出功率/體積功率密度高,由于轉(zhuǎn)子采用永磁體,體積較小功率密度中等,由于定子和轉(zhuǎn)子都有繞組,輸出功率與體積之比低于BLDC。
轉(zhuǎn)子慣性慣性小,動態(tài)特性較佳慣性大,動態(tài)特性較差
起動電流額定值,無需專門的啟動電路。大約是額定值的7倍,應(yīng)謹慎選擇合適的啟動電路。通常使用星型-三角形啟動器。
控制要求要保持電機運轉(zhuǎn),始終需要控制器。還可使用這一控制器控制轉(zhuǎn)速。固定轉(zhuǎn)速不需要控制器,只有需要改變轉(zhuǎn)速時才需要控制器。
差頻定子和轉(zhuǎn)子磁場的頻率相等轉(zhuǎn)子運行頻率低于定子磁場。差頻隨著電機負載的增大而增加。
應(yīng)用
恒定負載
如風(fēng)扇、泵、吹風(fēng)機這類應(yīng)用需要低成本控制器,多數(shù)運行在開環(huán)狀態(tài)。
變化負載
家用電器中的洗衣機、干衣機、壓縮機,汽車上的燃料泵、電子轉(zhuǎn)向、引擎控制,航空航天領(lǐng)域中的離心機、機械臂、陀螺儀控制等可能使用轉(zhuǎn)速反饋設(shè)備,運行在半閉環(huán)或全閉環(huán)狀態(tài)。這些應(yīng)用使用高級控制算法,從而增加了控制器的復(fù)雜性,提高了整個系統(tǒng)的造價。
定位應(yīng)用
機械齒輪或定時傳送帶等應(yīng)用中轉(zhuǎn)速和轉(zhuǎn)矩的動態(tài)響應(yīng)很重要,并且可能需要頻繁切換轉(zhuǎn)向。可能需要有三個控制環(huán)同時工作:轉(zhuǎn)矩控制環(huán)、轉(zhuǎn)速控制環(huán)和位置控制環(huán)。
關(guān)于直流無刷電動機,小編為大家就分享這些。歡迎聯(lián)系我們合運電氣有限公司,以獲取更多相關(guān)知識。
上一篇:100MW!山東一建昌邑龍池光伏總承包項目開工建設(shè)
下一篇:直流電動機







 魯公網(wǎng)安備 37010502001687號
魯公網(wǎng)安備 37010502001687號


